
Suma de operadores de momento angular: coeficientes de Clebsch-Gordan
- Sean
y
sendos operadores de momento angular en dos subsistemas cinemáticamente independientes,
, actuando en los sendos espacios
, de correspondientes dimensiones finitas
.
-Puede comprobarse que el operador suma de los dos dados,
,
que actúa en el espacio, asociado a la unión de los subsistemas, y que está engendrado por la unión de las dos bases ortonormales comunes a
y
, de un lado, y a
y
, de otro, cuya dimensión es
, es también un operador de momento angular, esto es, satisface las reglas de conmutación definitorias, esto es:
,
o, en notación compacta equivalente:
.
-En espacios bipartitos, el operadorse suele denominar operador de momento angular total.
- Una forma posible de expresar los estados y valores propios del operador momento angular total es a través de los coeficientes de Clebsh-Gordan. Para obtenerlos, partimos del hecho de que los cuatro operadores
conmutan entre sí, por lo que pueden formar parte conjunta de un C.C.O.C., en unión con los, en su caso, observables que se requieran, y que se simbolizarán en principio por unas variables
.
-Sea
un vector de la base ortonormal asociada al C.C.O.C. elegido en el Hilbert, el cual satisfará el conjunto de ecuaciones:
.
- Puesto que los observables adicionales, asociados con los números cuánticos
,
, de dimensiones
y
; trabajaremos en el Hilbert
, con dimensión igual a
fueran impropios, no modificaría el desarrollo teórico: simplemente los adicionales
- Así pues, para unos valores dados de los números cuánticos
y
, el conjunto de vectores
,
autovectores simultáneos de los cuatro operadoresy
,
, generan un subespacio de Hilbert
- Dado que tanto
como
conmutan con
que satisfacen el conjunto de ecuaciones:
.
- Es decir, un conjunto C.C.O.C. alternativo es uno que integre los operadores
, junto con, en su caso, otros observables que conmuten entre sí y con todos ellos (los que antes indicábamos con los parámetros
), cuyos autovectores simultáneos, integrantes de una base ortonormal del Hilbert
antes indicados.
- El problema que se plantea, la suma de momentos angulares, consiste en, dados unos operadores de momento angular
, determinar :
1. Los valores posibles de los números cuánticos de momento angular total,, y de tercera componente de momento angular total
, así como la posible degeneración involucrada.
2. Las relaciones entre los vectores que especifican cada representación, esto es, la expresión de los estados, y viceversa.
-En definitiva, se trata de especificar la correspondiente transformación unitaria que proporciona la rotación de ejes deseada en el espacio - En el formalismo clásico, la solución al problema es que el momento angular total clásico toma cualquier valor entre
y
, mientras que el valor de la tercera componente
. En el formalismo cuántico, las reglas de conmutación
características (definitorias) de todo operador de momento angular conllevan la discretización de los valores permitidos.

Coeficientes de Clebsch-Gordan
- Sean las dos bases ortonormales en el subespacio de Hilbert
y
, para todos los
- Todo vector del subespacio admite expresión en términos de las dos bases, es decir,
se tiene que:
.
-En particular, la transformación unitaria entre las dos bases admite expresión como:
,
expresión que define en una notación frecuente (no es la única en los textos) los coeficientes de acoplamiento angular denominados como «de Clebsch-Gordan«,
,
coeficientes que conviene indicar nunca dependerán, en su caso, de los números cuánticos adicionales - Determinación de los valores posibles para los números cuánticos
- Para cada
.
- Puesto que
, se ha de cumplir:
,
lo que permite simplificar la notación:
.
- A partir de los rangos de valores
,
,
,
la condiciónconduce a que el valor máximo de
, de manera que
.
-Obsérvese que el hecho de que el valor mínimo deno implica que el valor mínimo de
, ya que al ser ambos
no-negativos, se implicaría
.
- Dados los valores máximos de
,
de donde, dada la normalización del estado, se infiere
.
- Sea ahora el estado con valor máximo de
:
,
existente siempre que ninguno de los dos momentos angulares que se suman sea nulo.
-Esta ecuación es válida para dos valores dey
(
).
-Por tanto, hemos obtenido dos ecuaciones linealmente independientes. - Sea ahora el estado con valor máximo de
:
,
existente siempre que ninguno de los dos momentos angulares que se suman sea cero o la unidad.
-Esta ecuación es válida para tres valores de(
).
-en este caso, pues, hemos obtenido tres ecuaciones linealmente independientes - El proceso se continúa, obteniendo una serie de sistemas de una, dos, tres… ecuaciones para la secuencia de estados
con
. La pregunta pendiente es: ¿cuál es el valor mínimo de
-Obsérvese que, puesto que.
-Este resultado se puede confirmar:
(ya que).
- Para cada
- En resumen: Dados dos momentos angulares
y
, los únicos valores posibles para los números cuánticos del momento angular suma
y su tercera componente
;
dado.
- Determinación de los coeficientes: convenio de Condon-Shortley ampliado:
- Según ha quedado establecido:
si
- Para calcular los restantes coeficientes, se hacen actuar los operadores escalón,
:
,
lo que se realiza, a efectos de determinar unívocamente los valores, estableciendo un convenio que fije las fases relativas entre estados, en particular el convenio de Condon-Shortley antes ya establecido, que conlleva que todos los elementos de las matrices correspondientes a los operadores escalón sean no-negativos.
Por tanto, ampliando ahora este convenio, se establecen tres proposiciones:
-Proposición 1 (P1): se fija la fase relativa entre los estados:
y
,
y
como nula (cf. [GAL-89]p.249; en los seis casos), lo que equivale a fijar todos los elementos de las matrices correspondientes a los seis operadores escalón (,
y
P1:
P1.1:,
P1.2:
-Proposición 2 (P2): se toma la componente del estadosegún el estado
como real no-negativa:
P2: - Aplicado el convenio, se implica que todos los coeficientes de Clebsh-Gordan resultan reales y, en particular, el valor
.
- Según ha quedado establecido:
- Determinación de los coeficientes: esbozo de un procedimiento (cf. [GAL-89], pp. 265ss.):
- Se parte del estado
,
y se aplican los operadores escalón:
;
;
a continuación, se multiplica a la izquierda por el bra, donde
representa un valor fijo de la correspondiente variable, obteniéndose:
,
esto es:
.
-Estas dos ecuaciones, junto con las condiciones de ortonormalización de los estados, constituyen la «llave maestra» para la obtención de los valores de los distintos coeficientes de Clebsch-Gordan. - Comenzamos imponiendo en la primera ecuación anterior, la correspondiente al operador escalón up,
, el valor
:
,
donde es obvio que
y
,
ya que.
- A continuación, partiendo del valor
, esta ecuación permite obtener todos los coeficientes
en términos del
:
-Si:
-Si:
- Puesto que todos los coeficientes de Clebsch-Gordan involucrados en las anteriores ecuaciones son reales, fijado
, se garantiza el carácter también real de todos los coeficientes
:
,
ecuación que permite calcular los restantes coeficientes, que serán también todos reales, ya que todos los coeficientes en la ecuación lo son.
-Nota: en la referencia [GAL-89], p. 400, se encuentra la expresión de una fórmula general para el cálculo de los coeficientes de C.-G.; en cualquier caso, resulta mucho más práctico en su empleo obtenerlos a partir de las numerosas tablas de sus valores disponibles.
- Se parte del estado
- Propiedades: Los coeficientes de Clebsch-Gordan, que son las componentes de la transformación unitaria en el espacio de Hilbert
,
y
definidos a partir de la ecuación
(expresión general de una transformación unitaria U, definida segúnentre sendas bases
y
, de elementos
),
poseen las siguientes propiedades (resumen):- Algunos valores particulares especiales:
1.1.
1.2.
1.3.si
es impar.
1.4.
1.5.
1.6. - Adoptado el convenio de Condon-Shortley, todos los coeficientes son reales:
- Relaciones de unitariedad:
3.1.
3.2.
- Relación inversa:
- Relación de ortogonalidad: la matriz de transformación, por ser unitaria y real, es también ortogonal:
5.1.
,
esto es:
.
5.2.
,
esto es:
.
Notas:
-una matrizes ortogonal
(toda matriz real ortogonal es real unitaria, y viceversa).
-U es unitaria
(utilizando en ambas deducciones la identidad de Parseval y el hecho de que todos los coeficientes de C.-G. son reales). - Propiedades de simetría:
6.1.
6.2.
6.3
6.4.
6.5.
6.6.
(donde las tres últimas expresiones se derivan de las tres primeras).
- Algunos valores particulares especiales:
- Tablas de coeficientes de Clebsch-Gordan: pueden encontrarse numerosas tablas en internet, por ejemplo, en las páginas:
–Wikipedia: Anexo
–https://www.uco.es/hbarra/index.php/utilidades/83-cg: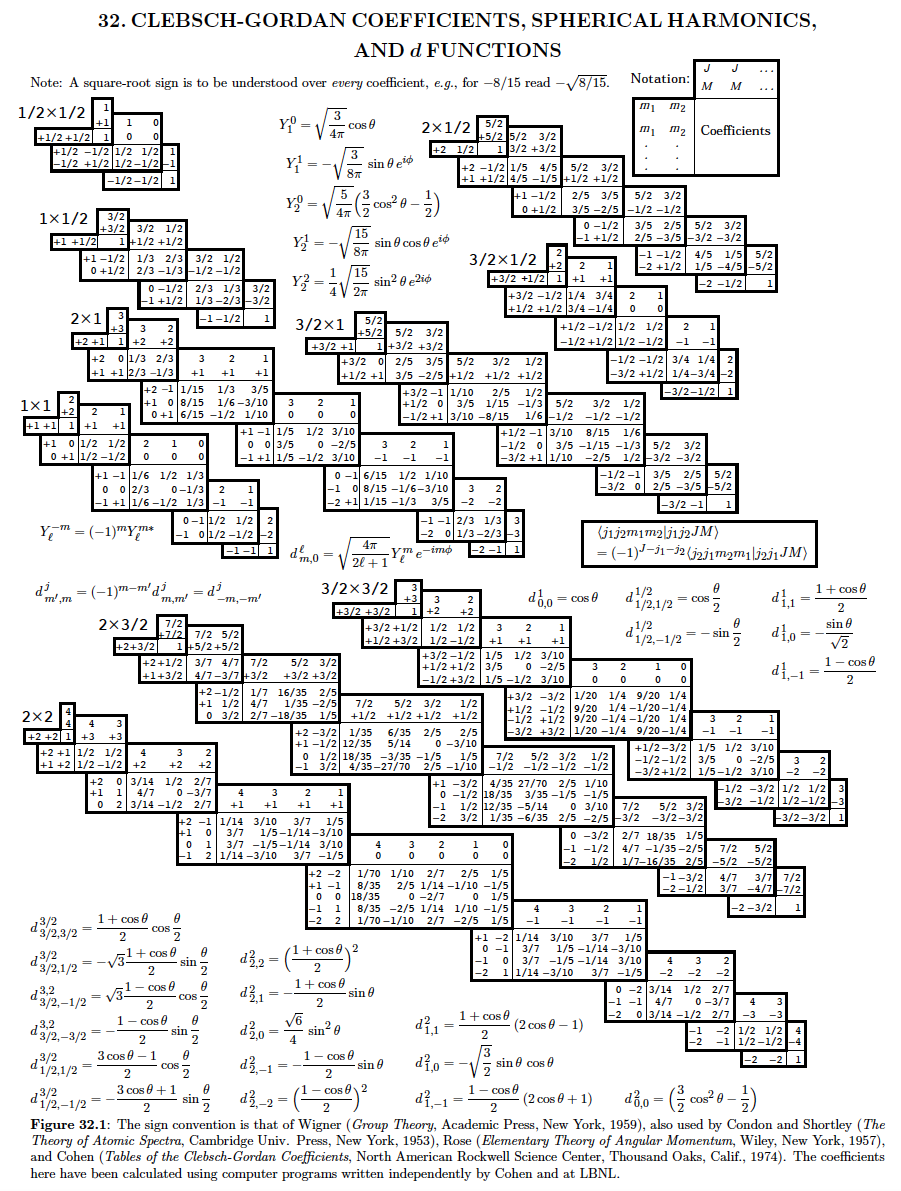
Tabla de coeficientes de Clebsch-Gordan (fuente: ver pie figura, procedente de https://www.uco.es/hbarra/index.php/utilidades/83-cg).





























![=\, \hbar \, [(J \mp M)\,(J \pm M + 1)]^{\frac{1}{2}}\,\sum_{M_1,M_2} C(J_1\,J_2\,J|\,M_1\,M_2\,M \pm 1)\, | J_1\,M_1\,J_2\,M_2\,>](https://s0.wp.com/latex.php?latex=%3D%5C%2C+%5Chbar+%5C%2C+%5B%28J+%5Cmp+M%29%5C%2C%28J+%5Cpm+M+%2B+1%29%5D%5E%7B%5Cfrac%7B1%7D%7B2%7D%7D%5C%2C%5Csum_%7BM_1%2CM_2%7D+C%28J_1%5C%2CJ_2%5C%2CJ%7C%5C%2CM_1%5C%2CM_2%5C%2CM+%5Cpm+1%29%5C%2C+%7C+J_1%5C%2CM_1%5C%2CJ_2%5C%2CM_2%5C%2C%3E&bg=ffffff&fg=000&s=0&c=20201002)
![=\, \hbar \,\sum_{M_1,M_2} C(J_1\,J_2\,J\,|\,M_1\,M_2\,M)\, \lbrace [(J_1 \mp M_1)(J_1 \pm M_1 + 1)]^{\frac{1}{2}}\,| J_1\, M_1 \pm 1\, J_2\, M_2 >](https://s0.wp.com/latex.php?latex=%3D%5C%2C+%5Chbar+%5C%2C%5Csum_%7BM_1%2CM_2%7D+C%28J_1%5C%2CJ_2%5C%2CJ%5C%2C%7C%5C%2CM_1%5C%2CM_2%5C%2CM%29%5C%2C+%5Clbrace+%5B%28J_1+%5Cmp+M_1%29%28J_1+%5Cpm+M_1+%2B+1%29%5D%5E%7B%5Cfrac%7B1%7D%7B2%7D%7D%5C%2C%7C+J_1%5C%2C+M_1+%5Cpm+1%5C%2C+J_2%5C%2C+M_2+%3E&bg=ffffff&fg=000&s=0&c=20201002)
![[(J \mp M)\,(J \pm M + 1)]^{\frac{1}{2}}\,C(J_1\,J_2\,J\,|\, \bar{M_1}\,\bar{M_2}\,M \pm 1) \, \delta_{M_1, \bar{M_1}}\, \delta_{M_2, \bar{M_2}}](https://s0.wp.com/latex.php?latex=%5B%28J+%5Cmp+M%29%5C%2C%28J+%5Cpm+M+%2B+1%29%5D%5E%7B%5Cfrac%7B1%7D%7B2%7D%7D%5C%2CC%28J_1%5C%2CJ_2%5C%2CJ%5C%2C%7C%5C%2C+%5Cbar%7BM_1%7D%5C%2C%5Cbar%7BM_2%7D%5C%2CM+%5Cpm+1%29+%5C%2C+%5Cdelta_%7BM_1%2C+%5Cbar%7BM_1%7D%7D%5C%2C+%5Cdelta_%7BM_2%2C+%5Cbar%7BM_2%7D%7D&bg=ffffff&fg=000&s=0&c=20201002)
![=\,\delta_{M_1 \pm 1, \bar{M_1}}\, \delta_{M_2,\bar{M_2}} \,C(J_1\,J_2\,J\,|\,\bar{M_1} \mp 1\,\bar{M_2}\,M )\,[(J_1 \mp \bar{M_1} +1)(J_1 \pm \bar{M_1})]^{\frac{1}{2}}](https://s0.wp.com/latex.php?latex=%3D%5C%2C%5Cdelta_%7BM_1+%5Cpm+1%2C+%5Cbar%7BM_1%7D%7D%5C%2C+%5Cdelta_%7BM_2%2C%5Cbar%7BM_2%7D%7D+%5C%2CC%28J_1%5C%2CJ_2%5C%2CJ%5C%2C%7C%5C%2C%5Cbar%7BM_1%7D+%5Cmp+1%5C%2C%5Cbar%7BM_2%7D%5C%2CM+%29%5C%2C%5B%28J_1+%5Cmp+%5Cbar%7BM_1%7D+%2B1%29%28J_1+%5Cpm+%5Cbar%7BM_1%7D%29%5D%5E%7B%5Cfrac%7B1%7D%7B2%7D%7D&bg=ffffff&fg=000&s=0&c=20201002)
![[(J \mp M)\,(J \pm M + 1)]^{\frac{1}{2}}\,C(J_1\,J_2\,J\,|\, M_1\,M_2\,M \pm 1)](https://s0.wp.com/latex.php?latex=%5B%28J+%5Cmp+M%29%5C%2C%28J+%5Cpm+M+%2B+1%29%5D%5E%7B%5Cfrac%7B1%7D%7B2%7D%7D%5C%2CC%28J_1%5C%2CJ_2%5C%2CJ%5C%2C%7C%5C%2C+M_1%5C%2CM_2%5C%2CM+%5Cpm+1%29&bg=ffffff&fg=000&s=0&c=20201002)
![=\, [(J_1 \mp M_1 +1)(J_1 \pm M_1)]^{\frac{1}{2}}\,C(J_1\,J_2\,J\,|\,M_1 \mp 1\,M_2\,M)](https://s0.wp.com/latex.php?latex=%3D%5C%2C+%5B%28J_1+%5Cmp+M_1+%2B1%29%28J_1+%5Cpm+M_1%29%5D%5E%7B%5Cfrac%7B1%7D%7B2%7D%7D%5C%2CC%28J_1%5C%2CJ_2%5C%2CJ%5C%2C%7C%5C%2CM_1+%5Cmp+1%5C%2CM_2%5C%2CM%29&bg=ffffff&fg=000&s=0&c=20201002)
![0\,=\, [(J_1 - M_1 +1)(J_1 + M_1)]^{\frac{1}{2}}\,C(J_1\,J_2\,J\,|\,M_1 - 1\,M_2\,J)](https://s0.wp.com/latex.php?latex=0%5C%2C%3D%5C%2C+%5B%28J_1+-+M_1+%2B1%29%28J_1+%2B+M_1%29%5D%5E%7B%5Cfrac%7B1%7D%7B2%7D%7D%5C%2CC%28J_1%5C%2CJ_2%5C%2CJ%5C%2C%7C%5C%2CM_1+-+1%5C%2CM_2%5C%2CJ%29&bg=ffffff&fg=000&s=0&c=20201002)





![[(J + M)\,(J - M + 1)]^{\frac{1}{2}}\,C(J_1\,J_2\,J\,|\, M_1\,M_2\,M - 1)](https://s0.wp.com/latex.php?latex=%5B%28J+%2B+M%29%5C%2C%28J+-+M+%2B+1%29%5D%5E%7B%5Cfrac%7B1%7D%7B2%7D%7D%5C%2CC%28J_1%5C%2CJ_2%5C%2CJ%5C%2C%7C%5C%2C+M_1%5C%2CM_2%5C%2CM+-+1%29&bg=ffffff&fg=000&s=0&c=20201002)
![=\, [(J_1 + M_1 +1)(J_1 - M_1)]^{\frac{1}{2}}\,C(J_1\,J_2\,J\,|\,M_1 + 1\,M_2\,M)](https://s0.wp.com/latex.php?latex=%3D%5C%2C+%5B%28J_1+%2B+M_1+%2B1%29%28J_1+-+M_1%29%5D%5E%7B%5Cfrac%7B1%7D%7B2%7D%7D%5C%2CC%28J_1%5C%2CJ_2%5C%2CJ%5C%2C%7C%5C%2CM_1+%2B+1%5C%2CM_2%5C%2CM%29&bg=ffffff&fg=000&s=0&c=20201002)
























Momento angular total
- Considérese una partícula con espín
y momento angular orbital
. La suma de ambos, esto es,
, define un operador que, puesto que los sumandos, operadores
, actúan en sendos espacios independientes, conmutan entre sí, luego el operador suma, denominado como momento angular total de la partícula y que actúa en el espacio
, queda definido como un operador de momento angular, ya que sus componentes satisfacen las relaciones de conmutación definitorias:
- Dado un sistema de
partículas, el operador momento angular total del sistema se define como la suma para todas las partículas de los operadores momentos angulares totales individuales:
,
donde aparecen y quedan definidos los operadores momento angular orbital total:
-Nota: ¡es muy importante no confundir en las fórmulas índices de partícula con índices de componentes! - El espacio de Hilbert
tiene dimensión
, y es usual considerar en él la base de componentes
,
de forma que cualquier estado del Hilbert admite desarrollo
.
-Obsérvese que la dimensión del espacio, de modo que
. Por ejemplo, si
y
, entonces la dimensión es 2; si
y
![\vec{J} \equiv (J_1,J_2,J_3) \;;\; [J_i\,,\,J_j]=i\hbar \, \epsilon_{ijk}\,J_k\,;\, i,j,k=1,2,3](https://s0.wp.com/latex.php?latex=%5Cvec%7BJ%7D+%5Cequiv+%28J_1%2CJ_2%2CJ_3%29+%5C%3B%3B%5C%3B+%5BJ_i%5C%2C%2C%5C%2CJ_j%5D%3Di%5Chbar+%5C%2C+%5Cepsilon_%7Bijk%7D%5C%2CJ_k%5C%2C%3B%5C%2C+i%2Cj%2Ck%3D1%2C2%2C3&bg=ffffff&fg=000&s=0&c=20201002)
![[\vec{L_i},\vec{L_j}]=\delta_{i,j}\,,\; i,j=1,\ldots,N](https://s0.wp.com/latex.php?latex=%5B%5Cvec%7BL_i%7D%2C%5Cvec%7BL_j%7D%5D%3D%5Cdelta_%7Bi%2Cj%7D%5C%2C%2C%5C%3B+i%2Cj%3D1%2C%5Cldots%2CN&bg=ffffff&fg=000&s=0&c=20201002)
![[\vec{S_i},\vec{S_j}]=\delta_{i,j}\,,\; i,j=1,\ldots,N](https://s0.wp.com/latex.php?latex=%5B%5Cvec%7BS_i%7D%2C%5Cvec%7BS_j%7D%5D%3D%5Cdelta_%7Bi%2Cj%7D%5C%2C%2C%5C%3B+i%2Cj%3D1%2C%5Cldots%2CN&bg=ffffff&fg=000&s=0&c=20201002)
![[\vec{J_i},\vec{J_j}]=\delta_{i,j}\,,\; i,j=1,\ldots,N](https://s0.wp.com/latex.php?latex=%5B%5Cvec%7BJ_i%7D%2C%5Cvec%7BJ_j%7D%5D%3D%5Cdelta_%7Bi%2Cj%7D%5C%2C%2C%5C%3B+i%2Cj%3D1%2C%5Cldots%2CN&bg=ffffff&fg=000&s=0&c=20201002)
![\vec{L} \equiv (L_1,L_2,L_3) \;;\; [L_i\,,\,L_j]=i\hbar \, \epsilon_{ijk}\,L_k\,;\, i,j,k=1,2,3](https://s0.wp.com/latex.php?latex=%5Cvec%7BL%7D+%5Cequiv+%28L_1%2CL_2%2CL_3%29+%5C%3B%3B%5C%3B+%5BL_i%5C%2C%2C%5C%2CL_j%5D%3Di%5Chbar+%5C%2C+%5Cepsilon_%7Bijk%7D%5C%2CL_k%5C%2C%3B%5C%2C+i%2Cj%2Ck%3D1%2C2%2C3&bg=ffffff&fg=000&s=0&c=20201002)
![\vec{S} \equiv (S_1,S_2,S_3) \;;\; [S_i\,,\,S_j]=i\hbar \, \epsilon_{ijk}\,S_k\,;\, i,j,k=1,2,3](https://s0.wp.com/latex.php?latex=%5Cvec%7BS%7D+%5Cequiv+%28S_1%2CS_2%2CS_3%29+%5C%3B%3B%5C%3B+%5BS_i%5C%2C%2C%5C%2CS_j%5D%3Di%5Chbar+%5C%2C+%5Cepsilon_%7Bijk%7D%5C%2CS_k%5C%2C%3B%5C%2C+i%2Cj%2Ck%3D1%2C2%2C3&bg=ffffff&fg=000&s=0&c=20201002)
Adición de los momentos angular orbital y de espín monoparticulares
- Considérese una partícula con espín
y momento angular orbital
, siendo su momento angular total la suma
de ambos.
- En el espacio de Hilbert
las autofunciones simultáneas de los operadores
y
son (en representación de coordenadas y coordenadas esféricas) los armónicos esféricos
, siendo
el número cuántico de momento angular orbital. El conjunto integrado por todos ellos, para todos los correspondientes valores del número cuántico de tercera componente
, constituye una base ortonormal en el espacio para cada
las autofunciones simultáneas de los operadores
y
son las funciones de espín
, base en
- Las autofunciones simultáneas de los cuatro operadores
, funciones del espacio
, se podrán expresar como producto directo de las funciones orbitales y de espín, ya que los correspondientes pares de operadores actúan separadamente sobre los sendos espacios orbital y de espín (caso particular):
,
siendo también frecuentes las notaciones equivalentes en representación de posiciones:
,
,
denominándose su conjunto completo como la base no acoplada.
-El espinor correspondiente sería en este caso:
- Los números cuánticos de momento angular total
,
y
toman los valores:
- Una base alternativa es la denominada como base acoplada, integrada por autofunciones simultáneas de los cuatro operadores
:
, para cada valor posible de
,
usándose también las notaciones alternativas en representación de posiciones:
-En la base acoplada no todos los operadores del C.C.O.C. actúan separadamente sobre los espacios orbital y de espín, de modo que el espinor no factorizará como antes. Esta base se suele utilizar cuando, a causa de una interacción física entre dos momentos angulares, estos ya no son constantes del movimiento independientes, de modo que sus valores individuales ya no siguen leyes de conservación, pero su suma, el momento angular total, sí se conserva.
-Las funcionesse denominan armónicos esféricos vectoriales.
- Las ecuaciones del cambio de base vienen dadas por los adecuados coeficientes de Clebsch-Gordan:
,
;
teniéndose pues
- Expresión del espinor:
,
una matriz deelementos:












Ejemplo: el caso de espín
- En el caso de una partícula de espín
, sustituyendo los valores de los coeficientes de C.-G., las anteriores expresiones se convierten en:
,
,
de modo que a partir de la tabla de coeficientes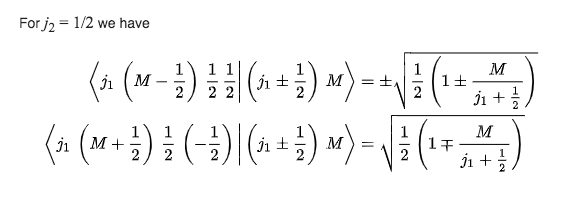
Coeficientes de Clebsch-Gordon para (fuente: Wikipedia).
se obtiene:
- Caso
:
1.A:
1.B: - Caso
:
2.A:
2.B:
,
esto es, el espinor:
- Caso




![=\, [ \, \sqrt{ \frac{l+m_j+\frac{1}{2}}{2l+1}} \, \mathcal{Y}_{l \ \frac{1}{2}}^{l + \frac{1}{2} \ m_l + \frac{1}{2}} \, + \, \sqrt{ \frac{l-m_j+\frac{1}{2}}{2l+1}} \, \mathcal{Y}_{l \ \frac{1}{2}}^{l - \frac{1}{2} \ m_l + \frac{1}{2}} \,] \delta_{m_s, +\frac{1}{2}}](https://s0.wp.com/latex.php?latex=%3D%5C%2C+%5B+%5C%2C+%5Csqrt%7B+%5Cfrac%7Bl%2Bm_j%2B%5Cfrac%7B1%7D%7B2%7D%7D%7B2l%2B1%7D%7D+%5C%2C+%5Cmathcal%7BY%7D_%7Bl+%5C+%5Cfrac%7B1%7D%7B2%7D%7D%5E%7Bl+%2B+%5Cfrac%7B1%7D%7B2%7D+%5C+m_l+%2B+%5Cfrac%7B1%7D%7B2%7D%7D+%5C%2C+%2B+%5C%2C+%5Csqrt%7B+%5Cfrac%7Bl-m_j%2B%5Cfrac%7B1%7D%7B2%7D%7D%7B2l%2B1%7D%7D+%5C%2C+%5Cmathcal%7BY%7D_%7Bl+%5C+%5Cfrac%7B1%7D%7B2%7D%7D%5E%7Bl+-+%5Cfrac%7B1%7D%7B2%7D+%5C+m_l+%2B+%5Cfrac%7B1%7D%7B2%7D%7D+%5C%2C%5D+%5Cdelta_%7Bm_s%2C+%2B%5Cfrac%7B1%7D%7B2%7D%7D&bg=ffffff&fg=000&s=0&c=20201002)
![+\,[ \, \sqrt{ \frac{l-m_j+\frac{1}{2}}{2l+1}} \, \mathcal{Y}_{l \ \frac{1}{2}}^{l + \frac{1}{2} \ m_l - \frac{1}{2}} \, +\, \sqrt{ \frac{l+m_j+\frac{1}{2}}{2l+1}} \, \mathcal{Y}_{l \ \frac{1}{2}}^{l - \frac{1}{2} \ m_l - \frac{1}{2}} \,] \delta_{m_s, -\frac{1}{2}}](https://s0.wp.com/latex.php?latex=%2B%5C%2C%5B+%5C%2C+%5Csqrt%7B+%5Cfrac%7Bl-m_j%2B%5Cfrac%7B1%7D%7B2%7D%7D%7B2l%2B1%7D%7D+%5C%2C+%5Cmathcal%7BY%7D_%7Bl+%5C+%5Cfrac%7B1%7D%7B2%7D%7D%5E%7Bl+%2B+%5Cfrac%7B1%7D%7B2%7D+%5C+m_l+-+%5Cfrac%7B1%7D%7B2%7D%7D+%5C%2C+%2B%5C%2C+%5Csqrt%7B+%5Cfrac%7Bl%2Bm_j%2B%5Cfrac%7B1%7D%7B2%7D%7D%7B2l%2B1%7D%7D+%5C%2C+%5Cmathcal%7BY%7D_%7Bl+%5C+%5Cfrac%7B1%7D%7B2%7D%7D%5E%7Bl+-+%5Cfrac%7B1%7D%7B2%7D+%5C+m_l+-+%5Cfrac%7B1%7D%7B2%7D%7D+%5C%2C%5D+%5Cdelta_%7Bm_s%2C+-%5Cfrac%7B1%7D%7B2%7D%7D&bg=ffffff&fg=000&s=0&c=20201002)




Adición de dos espines
- Sean dos partículas de espín
; el espín total
del sistema compuesto nos va a permitir usar la base acoplada en el espacio de espín suma
, de dimensión 4.
- Todo vector del subespacio admite expresión en términos de las dos bases antes consideradas, es decir,
se tiene que:
.
-En particular, la transformación unitaria entre las dos bases admite expresión como:
.
- Incorporando la notación usual para el caso de espín
-Base no acoplada (representación):
-Base acoplada: (representación); funciones
; valores
:
-Transformación unitaria:
,
obteniéndose las expresiones:
.
La función, antisimétrica bajo el intercambio de las dos partículas, se denomina singlete de espín, mientras que las tres funciones con
, simétricas, integran el denominado triplete de espín.


![\chi_{00}(1,2) \, = \, \frac{1}{\sqrt{2}} \ [\alpha(1) \ \beta(2) \; - \; \beta(1) \ \alpha(2)]](https://s0.wp.com/latex.php?latex=%5Cchi_%7B00%7D%281%2C2%29+%5C%2C+%3D+%5C%2C+%5Cfrac%7B1%7D%7B%5Csqrt%7B2%7D%7D+%5C+%5B%5Calpha%281%29+%5C+%5Cbeta%282%29+%5C%3B+-+%5C%3B+%5Cbeta%281%29+%5C+%5Calpha%282%29%5D&bg=ffffff&fg=000&s=0&c=20201002)

![\chi_{10} (1,2)\, = \, \frac{1}{\sqrt{2}} \ [\alpha(1) \ \beta(2) \; + \; \beta(1) \ \alpha(2)]](https://s0.wp.com/latex.php?latex=%5Cchi_%7B10%7D+%281%2C2%29%5C%2C+%3D+%5C%2C+%5Cfrac%7B1%7D%7B%5Csqrt%7B2%7D%7D+%5C+%5B%5Calpha%281%29+%5C+%5Cbeta%282%29+%5C%3B+%2B+%5C%3B+%5Cbeta%281%29+%5C+%5Calpha%282%29%5D&bg=ffffff&fg=000&s=0&c=20201002)
Referencias
[BAL-98] Ballentine, L.E.; “Quantum Mechanics: A Modern Development”; World Scientific; Singapore, 1998.
[BOH-79] Bohm, D.; “Quantum Theory”; Dover; New York, 1979.
[GAL-89] Galindo, A. y Pascual, P.; «Mecánica Cuántica», Eudema, 1989.
[NEU-91] Neumann, J. von; «Fundamentos matemáticos de la Mecánica Cuántica», CSIC, Raycar, Madrid, 1991.
[SCH-68] Shiff, L.I. ; Quantum Mechanics, 3º ed; McGraw-Hill, 1968.
Páginas complementarias
–Los coeficientes de Clebsch-Gordanen el blog la-macanica-cuantica.blogspot.com
–Momento angular en el blog la-mecanica-cuantica.blogspot.com: parte I.
–Momento angular en el blog la-mecanica-cuantica.blogspot.com: parte II.
–Momento angular en el blog la-mecanica-cuantica.blogspot.com: parte III.
APPS
-momento angular cuántico en la Wikipedia
–Addition of Angular Momenta in Quantum Mechanics en WOLFRAM Demonstrations Project
Dejar una contestacion