
Operador momento angular
- Dado un espacio de Hilbert, un operador de momento angular J se define como un conjunto de tres operadores autoadjuntos definidos sobre el espacio,
, que satisfacen las siguientes relaciones de conmutación:
.
-los tres operadores autoadjuntos, se denominan componentes de
.
- Establecida esta definición, pueden a partir de ella realizarse las de operador escalar y vectorial:
1. Un operadores escalar cuando satisface las siguientes relaciones de conmutación con el operador de momento angular
.
2.Un operadores vectorial cuando satisface las siguientes relaciones de conmutación con el operador de momento angular
, notándose entonces como
- El operador de momento angular
.
- Los tres operadores autoadjuntos
, suelen notarse con frecuencia como
, en referencia a un sistema cartesiano OXYZ de ejes en el espacio, teniéndose:
-Las relaciones de conmutación que definen un operador de momento angular pueden entonces expresarse como:
- El operador cuadrado del momento angular, operador
, se define según:
.
- El operador cuadrado del momento angular
,
esto es, es un operador escalar.
-Ejercicio:
donde se ha hecho uso de la propiedad
- Nota matemática (cf. [GAL-89], pp. 247 y 329): «Dado el operador autoadjunto de momento angular
, actuando en un espacio de Hilbert
de dimensión finita y definido en un dominio denso y estable bajo las tres componentes, de forma que
- Por tanto, matemáticamente, el problema es determinar tres operadores autoadjuntos
, donde
es el correspondiente número cuántico de momento angular, que por conveniencia y sin pérdida de generalidad puede tomarse como
(cf. [GAL-89], vol. I, p. 247).
-Nota 1: un conjunto de operadores lineales acotados en un espacio de Hilbert H se define
como conjunto irreducible si no existe ningún subespacio cerrado propio de H, distinto del subespacio nulo, que sea invariante bajo todos los operadores del conjunto. En otras palabras, H es el único subespacio cerrado no nulo que contiene a todos los subespacios invariantes bajo un conjunto irreducible de operadores.
-Nota 2: lema de Shur: un conjunto de operadores es irreducible si y sólo si su conjunto conmutante (el conjunto de todos los operadores que conmutan con todos los elementos del conjunto irreducible) consiste únicamente en múltiplos escalares de la identidad. - Moraleja y/o nota derivada: un tratamiento riguroso de la teoría de momento angular debería comenzar por un estudio de la simetría, y desarrollarse conforme a la teoría de grupos. Considerada en este contexto la simetría «rotación espacial», una transformación finita continua (unitaria), el momento angular va a constituir su generador, ligándose al correspondiente y fundamental principio de conservación. En definitiva, la invariancia de un sistema bajo diversas simetrías geométricas conduce a leyes de conservación de determinados observables del sistema, y el principio de conservación del momento angular, en particular, se deriva a partir de la observación de que, considerado un sistema físico aislado, y asumido que el espacio tridimensional es intrínsecamente isótropo, esto es, en su seno todas las direcciones son equivalentes, la física del sistema debe permanecer invariante bajo rotaciones en ese espacio. Por lo tanto, si el sistema no interacciona con su exterior, su momento angular total, que es el operador generador de las rotaciones espaciales, además de ser independiente del tiempo debe conmutar con el Hamiltoniano del sistema, por lo que se deriva que
-Sobre la conexión crucial entre la Teoría de Grupos y la Mecánica Cuántica, puede encontrase una introducción en el blog la-mecanica-cuantica.blogspot.com. También, consultar la referencia [GAL-89], vol. I, cap. 5, p. 250: «el conjunto de todas las rotaciones constituye un grupo de Lie conexo cuyos generadores, las componentes de« .




![[\vec{J}^2,J_z]=[J_x^2 \,+\, J_y^2 \, +\, J_z^2,J_z]=[J_x^2 \,+\, J_y^2 \,,J_z]](https://s0.wp.com/latex.php?latex=%5B%5Cvec%7BJ%7D%5E2%2CJ_z%5D%3D%5BJ_x%5E2+%5C%2C%2B%5C%2C+J_y%5E2+%5C%2C+%2B%5C%2C+J_z%5E2%2CJ_z%5D%3D%5BJ_x%5E2+%5C%2C%2B%5C%2C+J_y%5E2+%5C%2C%2CJ_z%5D&bg=ffffff&fg=000&s=0&c=20201002)
![= J_x[J_x,J_z]+[J_x,J_z]J_x+J_y[J_y,J_z]+[J_y,J_z]J_y](https://s0.wp.com/latex.php?latex=%3D+J_x%5BJ_x%2CJ_z%5D%2B%5BJ_x%2CJ_z%5DJ_x%2BJ_y%5BJ_y%2CJ_z%5D%2B%5BJ_y%2CJ_z%5DJ_y&bg=ffffff&fg=000&s=0&c=20201002)

![[AB,C]=A[B,C]+[A,C]B](https://s0.wp.com/latex.php?latex=%5BAB%2CC%5D%3DA%5BB%2CC%5D%2B%5BA%2CC%5DB&bg=ffffff&fg=000&s=0&c=20201002)
Valores propios de los operadores de momento angular
- Sea
sus componentes, es decir, tres operadores autoadjuntos actuando en un espacio de Hilbert
constituyendo un conjunto irreducible de operadores. - Puesto que los operadores
, conmutan entre sí, son diagonalizables simultáneamente, esto es, existe una base ortonormal común en el Hilbert
, y que cumplirán:
.
- Es usual elegir el eje
para señalar una dirección de cuantización arbitraria en el espacio, en cuyo caso la notación estándar que se adopta es:
,
y
,
expresándose en consecuencia las dos ecuaciones de autovalores anteriores en términos de los así introducidos números cuánticos de momento angular,, como:
.
-La relación general de ortonormalidad entre dos estados de la base se expresaría como:
.
-Nota: la anterior notación se debe considerar como generalizada, en el sentido de que, mientras no se demuestre (como se hará) que el espectro de los operadoreses puramente discreto, la expresión debería interpretarse, en cuanto al símbolo
, como capaz de, en su caso, incluir una hipotética parte continua.
- A partir del cálculo de la norma en el Hilbert del vector
se determina:
,
debiendo tenerse
y
.
-Así pues, dado un valor numérico determinado (¡es real!), se deriva:
, teniéndose dos posibilidades:
-una, tomar la raíz positiva,
-dos, tomar la raíz negativa
(la suma de raíces es -1 y su producto).
- Es convencional elegir valores positivos para el número cuántico de momento angular
,
ya que para cada valortal que
.
En otras palabras: puesto queconstituye un conjunto irreducible y se satisface la conmutación
, se tiene que
,
pudiendo tomar - A continuación, se definen los operadores escalón
:
;
pudiendo escribir las primeras dos ecuaciones de la siguiente forma compacta:
.
-Estos operadores satisfacen:
1. Los operadoresy
no son autoadjuntos:
2.
3.
4.
5.
6.
7.
8.
9.
10.
-estas dos últimas expresiones nos indican que al aplicar bien, se obtienen sendos estados que, una vez normalizados, conservan el número cuántico de momento angular
,
dondees un escalar por determinar. Este resultado justifica su denominación como «operadores escalón». Obsérvese que esta última ecuación ¡no es una ecuación de autovalores!
- A continuación, vamos a establecer el carácter puramente discreto del espectro de los operadores
,
ya que el operadores definido positivo.
-Seael máximo valor posible para el número cuántico
,
de donde se deriva que
-De forma análoga, para no violar la desigualdad previa, ha de existir unque sea el mínimo posible para el número cuántico
,
de donde se deriva que
-Reuniendo los dos resultados previos, se obtiene la igualdad:
-Por otra parte, siendoun entero positivo, o cero, se tiene:
,
dondees un escalar, teniéndose
.
-Sea ahorael valor máximo de
cuando se va disminuyendo de uno en uno el valor de
,
y se cumple que
-Del par de ecuaciones anteriores,y
, se deriva directamente el resultado:
.
-Se abren así sólo dos posibilidades:
1. Sies cero o un entero positivo par: en este caso, para ese valor considerado de
.
2. Si.
-Reuniendo resultados:
- En resumen:
1.
2. Dado un valor del número cuántico de momento angularvalores
.
3. En consecuencia, en la relación de ortonormalización
el símbolo - Ecuaciones de autovalores para los productos de los dos operadores escalón:
y
,
de las cuales se ha derivado:
.
- Actuación de los operadores escalón sobre los estados de la base:
Sea,
(esto es,en la ecuación respectiva).
-Puesto que
,
ya que la basees ortonormal, obteniéndose pues:
,
, donde
representa una fase sin fijar.
- Convenio de Condon-Shortley:
La fase(
).
-En particular, se elige como nula la fase relativay
, una elección que garantiza:
1.Todos los elementos de matriz de los operadoresson no-negativos:
, y lo mismo para
2. La matriz del operador
.
3. La matriz del operadores imaginaria pura:
.
Nota: ¡el que la matriz de - Obsérvese que, si a partir del estado
aplicamos repetidamente cada operador escalón, obteniendo la correspondientes secuencia de estados:
-para,
,
-para,
,
,
estas cadenas alcanzarán su fin cuando se incumpla la condición(¡recuérdese que
1. Los estados finales respectivos en las anteriores secuencias son losy
.
2. Y, comoy
a) para
b) para
siendo, obtener el
.
-Recopilando:
,
y, para cada valor
,
positivos o negativos. - Por tanto, la dimensión del subespacio de Hilbert generado por el correspondiente conjunto de autovectores simultáneos de los dos operadores
, para cada valor fijo de
.
-Este subespacio
- Nota (cf. [GAL-89], p. 251): Dado un sistema físico y su Hilbert asociado, la representación de momento angular (rotaciones) no es, en general, irreducible, sino que se suele descomponer en suma directa de representaciones irreducibles. En consecuencia,
-Es decir, el formalismo garantiza que existen C.C.O.C. que contienen unos operadores de momento angular, donde el tercer índice representa el conjunto adicional de números cuánticos requeridos en cada caso particular, y que especificarán los respectivos autovalores de los operadores adicionales que haya que incorporar para constituir, junto con
- Para cada conjunto determinado de valores de los integrantes de
, ese subconjunto de vectores genera el correspondiente subespacio
, de dimensión
.
-Por ejemplo, para una partícula sin espín, para la que su momento angular total, un posible C.C.O.C. es el
.










![[J_+\,,\,J_{-}]\,=\, 2\hbar J_{z}](https://s0.wp.com/latex.php?latex=%5BJ_%2B%5C%2C%2C%5C%2CJ_%7B-%7D%5D%5C%2C%3D%5C%2C+2%5Chbar+J_%7Bz%7D&bg=ffffff&fg=000&s=0&c=20201002)
![[ \vec{J}^2\,,\,J_{\pm}]\,=\, 0](https://s0.wp.com/latex.php?latex=%5B+%5Cvec%7BJ%7D%5E2%5C%2C%2C%5C%2CJ_%7B%5Cpm%7D%5D%5C%2C%3D%5C%2C+0&bg=ffffff&fg=000&s=0&c=20201002)
![[J_z\,,\,J_{\pm}] \,=\, J_z \ J_{\pm} \ - \ J_{\pm} \ J_z \,=\, \pm \hbar J_{\pm}](https://s0.wp.com/latex.php?latex=%5BJ_z%5C%2C%2C%5C%2CJ_%7B%5Cpm%7D%5D%C2%A0+%5C%2C%3D%5C%2C%C2%A0+J_z+%5C+J_%7B%5Cpm%7D%C2%A0+%5C+-%C2%A0+%5C+J_%7B%5Cpm%7D%C2%A0+%5C%C2%A0+J_z%C2%A0+%5C%2C%3D%5C%2C+%5Cpm+%5Chbar+J_%7B%5Cpm%7D&bg=ffffff&fg=000&s=0&c=20201002)





![=\, \hbar^2 [J(J+1) -M_{mx}^2 - M_{mx}] \, |JM_{mx} \, > \,\, =0](https://s0.wp.com/latex.php?latex=%3D%5C%2C+%5Chbar%5E2+%5BJ%28J%2B1%29+-M_%7Bmx%7D%5E2+-+M_%7Bmx%7D%5D+%5C%2C+%7CJM_%7Bmx%7D+%5C%2C+%3E+%5C%2C%5C%2C+%3D0+&bg=ffffff&fg=000&s=0&c=20201002)
![\Rightarrow [J(J+1) -M_{mx}^2 - M_{mx}]=0](https://s0.wp.com/latex.php?latex=%5CRightarrow+%5BJ%28J%2B1%29+-M_%7Bmx%7D%5E2+-+M_%7Bmx%7D%5D%3D0&bg=ffffff&fg=000&s=0&c=20201002)


![=\, \hbar^2 [J(J+1) -M_{mn}^2 + M_{mn}] \, |JM_{mn} \, > \,\, =0](https://s0.wp.com/latex.php?latex=%3D%5C%2C+%5Chbar%5E2+%5BJ%28J%2B1%29+-M_%7Bmn%7D%5E2+%2B+M_%7Bmn%7D%5D+%5C%2C+%7CJM_%7Bmn%7D+%5C%2C+%3E+%5C%2C%5C%2C+%3D0+&bg=ffffff&fg=000&s=0&c=20201002)
![\Rightarrow [J(J+1) -M_{mn}^2 + M_{mn}]=0](https://s0.wp.com/latex.php?latex=%5CRightarrow+%5BJ%28J%2B1%29+-M_%7Bmn%7D%5E2+%2B+M_%7Bmn%7D%5D%3D0&bg=ffffff&fg=000&s=0&c=20201002)




![\left. \begin{array}{r} J_-J_+ \,|J\, M\, > \,=\, \hbar^2 \,[J(J+1)-M(M+1)] \, |J\, M\, >\\ =\, \hbar^2 \,(J-M)(J+M+1)\, |J\, M\, > \end{array} \right.](https://s0.wp.com/latex.php?latex=%5Cleft.+%5Cbegin%7Barray%7D%7Br%7D+J_-J_%2B+%5C%2C%7CJ%5C%2C+M%5C%2C+%3E+%5C%2C%3D%5C%2C+%5Chbar%5E2+%5C%2C%5BJ%28J%2B1%29-M%28M%2B1%29%5D+%5C%2C+%7CJ%5C%2C+M%5C%2C+%3E%5C%5C++%3D%5C%2C+%5Chbar%5E2+%5C%2C%28J-M%29%28J%2BM%2B1%29%5C%2C+%7CJ%5C%2C+M%5C%2C+%3E+%5Cend%7Barray%7D+%5Cright.+&bg=ffffff&fg=000&s=0&c=20201002)


![J_{\pm} \, |JM \, > \, = \, e^{i\gamma}\, \hbar \,[(J \mp M)(J \pm M +1)]^{\frac{1}{2}} \, |J\, M\pm 1 >](https://s0.wp.com/latex.php?latex=J_%7B%5Cpm%7D+%5C%2C+%7CJM+%5C%2C+%3E+%5C%2C+%3D+%5C%2C+e%5E%7Bi%5Cgamma%7D%5C%2C+%5Chbar+%5C%2C%5B%28J+%5Cmp+M%29%28J+%5Cpm+M+%2B1%29%5D%5E%7B%5Cfrac%7B1%7D%7B2%7D%7D+%5C%2C+%7CJ%5C%2C+M%5Cpm+1+%3E&bg=ffffff&fg=000&s=0&c=20201002)



Representación matricial de los operadores de momento angular
- Sea una representación en la que ambos operadores
un estado de la base ortonormal en dicha representación, elegida según el convenio de Condon-Shortley e integrada por autoestados comunes a ambos operadores:
donde:
,
y, para cada valor
positivos o negativos. - El subespacio de Hilbert
,
es de dimensión finitay asumido el convenio de Condon-Shortley, por:
, con
,
, con
,
, con
,
, con
,
, con
,
, con
.
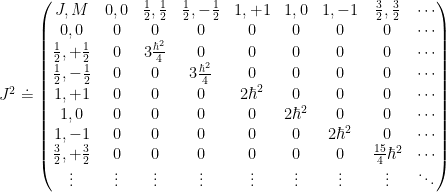
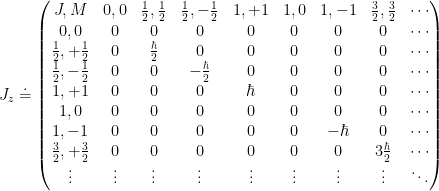
- Por ejemplo, si ordenamos los estados de la base del Hilbert
en orden creciente de
es una matriz compuesta de muchos bloques con todos sus elementos nulos, excepto algunos de áquellos que corresponden a bloques con igual valor de
-Por ejemplo:
- Debido a su peculiar estructura en bloques, es frecuente trabajar considerando por separado cada subespacio





:
-Puesto que las componentes del vector unitarioen la dirección especificada por los ángulos polares
se expresan como:
,
se implica la siguiente expresión matricial para la proyección del operador sobre la dirección
,
luego, para
:
:












Referencias
[BAL-98] Ballentine, L.E.; “Quantum Mechanics: A Modern Development”; World Scientific; Singapore, 1998.
[BOH-79] Bohm, D.; “Quantum Theory”; Dover; New York, 1979.
[GAL-89] Galindo, A. y Pascual, P.; «Mecánica Cuántica», Eudema, 1989.
[NEU-91] Neumann, J. von; «Fundamentos matemáticos de la Mecánica Cuántica», CSIC, Raycar, Madrid, 1991.
[SCH-68] Shiff, L.I. ; Quantum Mechanics, 3º ed; McGraw-Hill, 1968.
Páginas complementarias
–Momento angular en el blog la-mecanica-cuantica.blogspot.com: parte I.
–Momento angular en el blog la-mecanica-cuantica.blogspot.com: parte II.
–Momento angular en el blog la-mecanica-cuantica.blogspot.com: parte III.
-momento angular cuántico en la Wikipedia
-momento angular en mecánica cuántica: archivo de A. Prados, Universidad de Sevilla: https://personal.us.es/prados/Cuantica-1819/Tema-momento-angular.pdf (en caché: https://web.archive.org/web/20240207094520/https://personal.us.es/prados/Cuantica-1819/Tema-momento-angular.pdf).
-Sobre la conexión crucial entre la Teoría de Grupos y la Mecánica Cuántica: blog la-mecanica-cuantica.blogspot.com.
-suma de momentos angulares:
https://galileo.phys.virginia.edu/classes/752.mf1i.spring03/AddingAngularMomenta.htm
APPS
Dejar una contestacion