
Las rotaciones espaciales
- La simetría rotacional juega un papel fundamental en el estudio de muchos sistemas de gran interés físico. Los operadores de momento angular en mecánica cuántica son los generadores de las rotaciones espaciales, y de ahí su papel esencial en el formalismo. El hecho observacional de partida es que, considerado un sistema físico aislado, y asumido que el espacio tridimensional es intrínsecamente isótropo, esto es, en su seno todas las direcciones son equivalentes, la física del sistema debe permanecer invariante bajo rotaciones en ese espacio.
- El estudio riguroso de la simetría rotacional requiere la matemática de la teoría de grupos, pero en estos apuntes no se entrará en su desarrollo. En este apartado, se desarrolla sólo una introducción «ligera» al tema, con el fin primordial de introducir las matrices de rotación y establecer su conexión con los operadores cuánticos de momento angular, que descubriremos como los generadores de las rotaciones espaciales. Es oportuno recordar que, dado un sistema aislado, su Hamiltaniano es independiente del tiempo,
, en cuyo caso si el operador correspondiente a una simetría espacial es un operador (unitario) que es también independiente del tiempo,
, entonces se tiene que ambos operadores conmutan,
, y se deriva una ley de conservación para el operador generador de la transformación (continua). En el caso de las rotaciones espaciales la conservación se va a aplicar para su correspondiente generador, el operador de momento angular
.
- Se considera la operación de simetría «rotación en el espacio», a la cual asociamos el operador
, definido de forma que el transformado de cada vector
es el vector
con
,
que denominamos como una rotación del inicial o vector rotado. - Una rotación en el espacio euclídeo puede considerarse según dos «puntos de vista» para su formalización:
1. El «activo»: se deja invariante el sistema de ejes en el espacio de coordenadas y se transforma el sistema.
2. El «pasivo»: se deja el estado invariante y se transforman los ejes de coordenadas.
Ambas formalizaciones son equivalentes: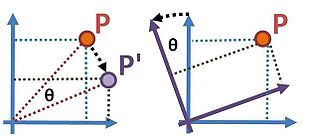
Rotaciones activa y pasiva: en la transformación activa (izquierda), un punto se mueve desde la posición P a P’ girándolo hacia la derecha en un ángulo θ sobre el origen del sistema de coordenadas. En la transformación pasiva (a la derecha), el punto P no se mueve, mientras que el sistema de coordenadas gira hacia la izquierda en un ángulo θ sobre su origen. Las coordenadas de P’ en el caso activo (es decir, en relación con el sistema de coordenadas original) son las mismas que las coordenadas de P en relación con el sistema de coordenadas girado (Fuente: Wikipedia). - Es conveniente representar el operador rotación en forma matricial:
,
donde todos los elementosdeben ser reales, por serlo las componentes de los vectores
.
-A continuación, se impone la condición de que el producto escalar entre cada dos vectores quede inalterado para una rotación arbitraria de ambos:
,
ecuación que conduce a un sistema de nueve ecuaciones para los elementos de la matriz:
,
y lo mismo paray
;
,
y lo mismo para,
,
,
y
.
Es decir: la matriz de rotación(
, de modo que sus columnas representan sendos vectores en
mutuamente ortonormales.
A esta conclusión se puede llegar igualmente imponiendo la condición de que el módulo de cualquier vector arbitrario - Los nueve elementos de la matriz de rotación
, a partir de la rotación en ese ángulo
(¡punto de vista pasivo!):
;
en particular, para los vectores unitarios:.
-los cosenos directores han de satisfacer las seis ecuaciones de ligadura que se requieren por la ortogonalidad de la matriz, de modo que sólo tres de los nueve parámetros son independientes. - La rotación inversa a una dada, o rotación que transforma
en
, donde queda por determinar la relación entre la nueva matriz
y la
-Aplicando la condición, e introduciendo la relación
, donde
representa el elemento en la fila i, columna j, de la matriz
.
- Puesto que las dos ecuaciones
han de ser compatibles, eliminandoentre los dos sistemas se obtiene:
,
ecuación que para ser correcta, dado que las componentes de
,
es decir, se ha de tener.
-Y, de forma análoga, variando el orden de los pasos en la anterior deducción, se llega a establecer finalmente la conmutación entre la matriz de rotación
,
estableciendo, de acuerdo con la notación usada, que - Por añadidura, a partir de la doble suma
, esto es,
, un resultado general, inversa igual a transpuesta, que junto con la anterior relación de conmutación constituye una de las posibles condiciones necesarias y suficientes para la ortogonalidad de una matriz:
,
como lo es también
.
- En conclusión,
es una matriz unitaria (toda matriz ortogonal real lo es):
.
- Puesto que
.
-se definen como rotaciones propias las rotaciones cuya matriz de rotación. Las matrices de rotación en un espacio euclídeo de dimensión n,
, constituyen el grupo ortogonal SO(n), no abeliano
.
-se definen como rotaciones impropias las rotaciones cuya matriz de rotación. Una rotación de este tipo constituye en realidad una inversión, es decir, la conjunción de una rotación más una reflexión.







Las rotaciones espaciales y los ángulos de Euler
- Toda rotación espacial puede configurarse como función de tres parámetros independientes (que son variables de variación continua, puesto que la rotación espacial se va a conformar como una transformación finita continua, unitaria). Una forma de fijar estos tres parámetros es elegirlos como los denominados «ángulos de Euler«, definidos, por ejemplo (múltiples posibilidades: véase vídeo conjuntos de ángulos Euler y conjuntos de Tait-Brian o náuticos; lo mismo en web U. de Sevilla), como:
-Sea un sistema de ejes cartesiano, dextrógiro, y sean las operaciones consecutivas sobre él (la siguiente suele ser la secuencia de giros más empleada en mecánica cuántica):
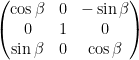
1. Rotación pasiva positiva (sentido antihorario) de ángulo, con
, alrededor del eje
: los ejes originales se transforman a los
, con
.
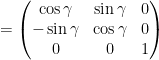
2. Rotación pasiva positiva de ángulo, con
, alrededor del eje
: los ejes
, con
.
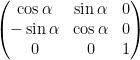
3.Rotación pasiva positiva (sentido antihorario) de ángulo, con
, alrededor del eje
: los ejes originales se transforman a los
.
-Recordemos que el punto de vista pasiva es aquel que deja inalterado cada vector
-Para la correspondiente rotación activa positiva (sentido antihorario), rotación del sistema, hay que calcular la matriz inversa a la anterior:



Rotación espacial con ángulo y eje arbitrarios
- Sea la operación de rotación espacial (activa) consistente en el giro antihorario, en un ángulo positivo
, en torno a la dirección señalada por el vector unitario
de coordenadas
en un sistema cartesiano
-La expresión general de la correspondiente matriz de rotación se deriva a partir de la expresión
,
o, aplicando la ligadura:
-el resultado final es (fórmula de Rodrigues para la rotación activa):
cuyos elementos responden a la fórmula:
-Y, para la rotación pasiva (fórmula de Rodrigues para la rotación pasiva):
cuyos elementos responden a la fórmula:
- Propiedades:
(¡pero
!) .
- La relación entre los tres parámetros que especifican esta matriz de rotación y una tríada de ángulos de Euler es (cf. [GAL-89], p. 259):
,
donde.
- Ejemplos (rotaciones activas: se gira el sistema, su vector, en sentido antihorario, un ángulo positivo
- Giro en sentido antihorario de un ángulo
en torno al eje
- Giro en sentido antihorario de un ángulo
:
- Giro en sentido antihorario de un ángulo
:
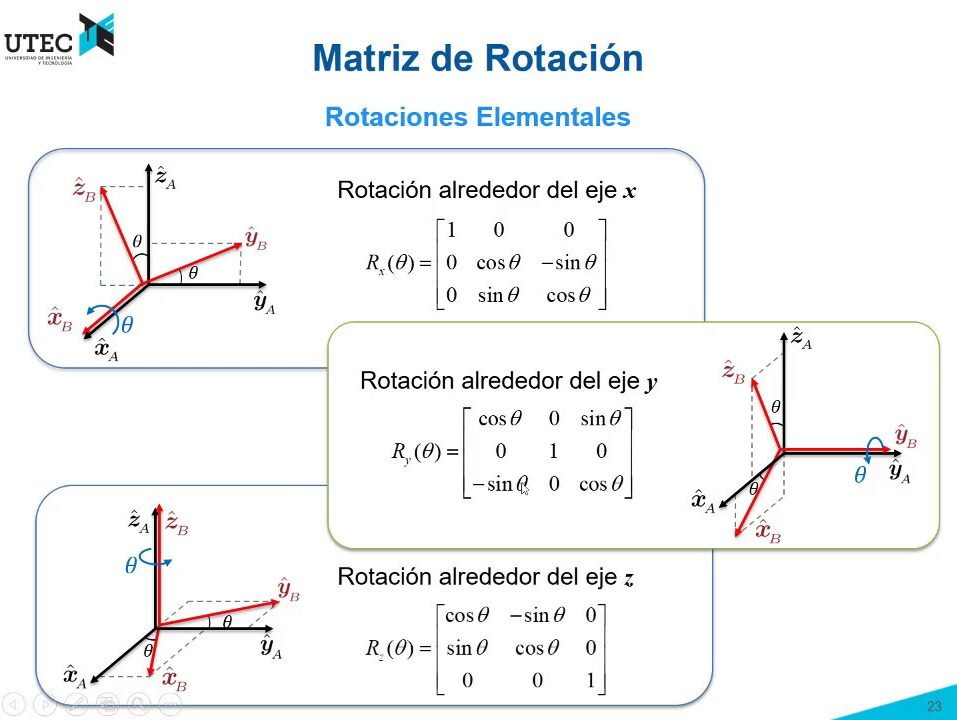
Rotaciones elementales activas (imagen de: https://www.youtube.com/watch?v=8zZk__FwYsk).
- Giro en sentido antihorario de un ángulo
- Ejemplos (rotaciones pasivas: se giran los ejes; recuérdese que, dado
,
, representando el lado de la izquierda de la igualdad un giro en sentido horario de los ejes y el lado derecho un giro del sistema el mismo ángulo en valor absoluto pero con sentido antihorario; además,
, en este caso los dos lados refiriendo a rotaciones en sentido antihorario):
- Giro en sentido antihorario de un ángulo
en torno al eje
):
- Giro en sentido antihorario de un ángulo
):
- Giro en sentido antihorario de un ángulo
):
- Giro en sentido antihorario de un ángulo
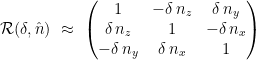
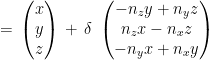
- Para rotaciones infinitesimales de ángulo
suficientemente pequeño, de modo que se puedan tomar las aproximaciones
,
las expresiones de las anteriores matrices de rotación se aproximan y, como consecuencia, la transformación de los vectores en

















Rotaciones y momento angular
- En este apartado va a quedar establecida la acción de los operadores de momento angular como generadores de las rotaciones. Puesto que no se hará uso de la teoría de grupos, el tratamiento será superficial.
1. Rotaciones y momento angular orbital
- Dado un sistema físico aislado, cuyo Hamiltoniano será por tanto independiente del parámetro temporal, y asumido que el espacio tridimensional es intrínsecamente isótropo, esto es, en su seno todas las direcciones son equivalentes, la física del sistema debe permanecer invariante bajo rotaciones en ese espacio, o sea, las leyes físicas que atañen al sistema deben permanecer invariantes bajo una rotación en el espacio.
- Sea una partícula sin espín, sistema para el que las tres componentes del vector posición integran un C.C.O.C. Se prepara al sistema experimentalmente (medidas de primera especie) en el estado describible, en representación de coordenadas, por el vector
del Hilbert asociado al sistema en el formalismo mecano-cuántico.
- A continuación, se considera una rotación (activa) de ángulo
(sentido antihorario),
, alrededor de un eje de dirección dada por el vector unitario
-un punto de coordenadas antes del giro
,
siendola correspondiente matriz de rotación, de componentes
-el dispositivo girado preparará al sistema en el estado correspondiente a la nueva función de ondas.
-si la partícula se hallaba en el estado(representación de posiciones), probabilidad 100% de ser encontrada bajo medida en la posición
, transformación de simetría implementable por el operador unitario
(teorema de Wigner) :
;
por lo tanto, debe ser
(por isotropía del espacio, debe conservarse para todo par de estados del Hilbert el producto escalar:
).
- Con la elección de fases adecuada ([GAL-89], p. 241), se establece que
no depende de
,
y lo mismo (elección de fases relativas para los autoestados de momento según [GAL-89], p. 129) para los autoestados del operador momento,
- A partir de esta última ecuación se establece que la función de onda de una partícula sin grados de libertad internos se transforma bajo rotaciones como un escalar:
-En resumen: a partir de la isotropía asumida del espacio, que conlleva que las probabilidades de transición entre dos estados dados y sus sendos rotados deben conservarse, se deriva (teorema de Wigner) la unitariedad del operador





1.1. Rotaciones infinitesimales y momento angular orbital
- Considérese ahora la transformación unitaria infinitesimal consistente en la rotación infinitesimal (la operación más próxima al elemento identidad del grupo de rotaciones) de ángulo
y
, de modo que la matriz de rotación
toma la expresión
cuyos elementos responden a la fórmula:
- De forma análoga, se obtiene
,
y también
- Por lo tanto, usando las ecuaciones anteriores que explicitan la acción del operador
,
,
se obtiene que la rotación infinitesimal de ángulo
,
que tras un desarrollo en serie de Taylor cortado en primer orden incluido se convierte en
-Aplicando la ecuación
,
se deriva finalmente:
,
donderepresenta el momento angular orbital de la partícula, quedando así establecida su componente
como el generador de la rotación infinitesimal de ángulo
- Por ejemplo, consideremos el de un giro infinitesimal de ángulo
;
,
que tras un desarrollo en serie de Taylor cortado en primer orden incluido se convierte en
,
obteniéndose pues:
.
-En particular, las tres componentes del momento angular orbital
-Obsérvese que, puesto que las tres componentes de un momento angular no conmutan entre sí, dos rotaciones en torno a diferentes direcciones, en general, no conmutarán entre sí: se trata de un grupo no abeliano. Dos rotaciones sí conmutarán cuando se realicen en torno a la misma dirección.














1.2. Rotaciones finitas y momento angular orbital
- Cualquier rotación finita puede considerarse como producida a partir de la aplicación sucesiva de rotaciones infinitesimales, todas alrededor del correspondiente eje de rotación; en particular, para una rotación finita de ángulo
- Tomando un desarrollo en serie de Taylor:
Se obtiene pues una ecuación diferencial ordinaria lineal de primer orden homogénea, a la que se añade la condición de contorno
,
lo que determina la solución
,
que identifica al operador momento angular orbital como el generador de las rotaciones finitas. - La generalización a un sistema de
partículas es directa:
,
de forma que
- Propiedades:
- Existencia de operador inverso:
tal que
- No conmutatividad:
,
una consecuencia directa de que
-Pero dos rotaciones en torno al mismo eje sí conmutan:
- Asociativa:
- Relación con los ángulos de Euler:
- Existencia de operador inverso:










![[\hat{n}_i \cdot \vec{J} \ , \ \hat{n}_j \cdot \vec{J} ] \, \ne 0 \; sii \; i \ne j](https://s0.wp.com/latex.php?latex=%5B%5Chat%7Bn%7D_i+%5Ccdot+%5Cvec%7BJ%7D+%5C+%2C+%5C+%5Chat%7Bn%7D_j+%5Ccdot+%5Cvec%7BJ%7D+%5D+%5C%2C+%5Cne+0+%5C%3B+sii+%5C%3B+i+%5Cne+j&bg=ffffff&fg=000&s=0&c=20201002)





1.3. Invariancia bajo rotaciones y conservación del momento angular orbital
- Bajo la hipótesis de un espacio isótropo, sea un sistema físico sin grados de libertad intrínsecos (sin espín), que supondremos aislado y conservativo (no hay campos externos que le afecten; el Hamiltoniano es independiente del tiempo y representa la energía total del sistema). El sistema se define como invariante bajo rotaciones cuando cada estado del sistema
y su transformado bajo la transformación de simetría «rotación»,
, evolucionan según la misma ecuación de movimiento, la ecuación de Schrödinger:
(¡el mismo operadoren las dos ecuaciones!). Si se cumple esta condición, se implica que:
,
ecuación donde se ha usado que la transformación de simetría
Por lo tanto,
,
lo que garantiza que el hamiltoniano debe ser invariante bajo la transformación
,
cumpliéndose así la definición dada de la invariancia bajo rotaciones del sistema en términos de la ecuación de Schrödinger:
- El resultado es recíproco: Un sistema físico (
de las
- Como la transformación de simetría
.




1.4. Transformación de estados y observables bajo rotaciones
- Bajo la transformación de simetría que constituye el grupo de las rotaciones espaciales finitas, una operación de simetría implementada por el operador unitario
,
con el operador momento angular orbital total
-Estados del Hilbert (representación de posiciones):
,
o, en notación formal general,
;
-Operadores sobre el Hilbert:
;
conservándose los elementos de matriz:
.
- Propiedades (¡ya que
-Si, entonces
, donde
.
-sies un observable del sistema, su relación de transformación bajo
es también un observable, y que poseen el mismo espectro, teniéndose:
.
-el subespacio deconformado por todos los vectores propios de
-toda relación algebraica entre los observables del sistema se mantiene bajo - Ejemplos de transformación de operadores:
- Operador posición (advertencia: se usa la misma notación que para el vector posición
¡pero ahora se trata de un operador sobre el Hilbert!:
!):
1.1. Rotación finita:
;
,
donde se ha aplicado la ecuación del cálculo operatorial
-Etapas de cálculo:
a)
b)
c)
d)
e)
-finalmente:
-Para la componentedel operador posición:
,
y expresiones análogas paray
.
-Obsérvese que, formalmente, hemos establecido el mismo modo de transformación para el operador posiciónbajo la simetría implementada por
.
-Es decir: el operador posiciónimplementada por el operador unitario
como lo hace el vector posición
; recuérdense las expresiones de las matrices de rotación activa,
y la correspondiente rotación pasiva:
1.2. Caso particular: rotación infinitesimal:
- Operador momento: con la misma advertencia que antes, y de forma análoga, este operador sobre el Hilbert se transforma según:
2.1. Rotación finita:
;
-Es decir: el operador momentose transforma bajo una rotación activa
bajo la correspondiente rotación pasiva representada por la matriz de rotación
2.2. Caso particular: rotación infinitesimal:
- Operador momento angular: por ejemplo, el operador momento angular
;
:
- Operador posición (advertencia: se usa la misma notación que para el vector posición

![e^ABe^{-A}=B+[A,B]+\frac{1}{2!} [A,[A,B]]+\ldots](https://s0.wp.com/latex.php?latex=e%5EABe%5E%7B-A%7D%3DB%2B%5BA%2CB%5D%2B%5Cfrac%7B1%7D%7B2%21%7D+%5BA%2C%5BA%2CB%5D%5D%2B%5Cldots&bg=ffffff&fg=000&s=0&c=20201002)
![[\hat{n} \cdot \vec{L} \, , \, r_i] \, = \, \sum_j n_j [L_j , r_i] \, = \, \sum_j n_j \ \sum_{kl} \epsilon_{jkl}[r_kp_l , r_i]](https://s0.wp.com/latex.php?latex=%5B%5Chat%7Bn%7D+%5Ccdot+%5Cvec%7BL%7D+%5C%2C+%2C+%5C%2C+r_i%5D+%5C%2C+%3D+%5C%2C+%5Csum_j+n_j+%5BL_j+%2C+r_i%5D+%5C%2C+%3D+%5C%2C+%5Csum_j+n_j+%5C+%5Csum_%7Bkl%7D+%5Cepsilon_%7Bjkl%7D%5Br_kp_l+%2C+r_i%5D&bg=ffffff&fg=000&s=0&c=20201002)
![= \, \sum_{jkl} n_j \epsilon_{jkl}r_k [p_l , r_i] \, = \, -i \hbar \sum_{jkl}n_j \epsilon_{jkl} r_k \delta_{li}\, = \, -i \hbar \sum_{jk}n_j \epsilon_{jki} r_k](https://s0.wp.com/latex.php?latex=%3D+%5C%2C+%5Csum_%7Bjkl%7D+n_j+%5Cepsilon_%7Bjkl%7Dr_k+%5Bp_l+%2C+r_i%5D+%5C%2C+%3D+%5C%2C+-i+%5Chbar+%5Csum_%7Bjkl%7Dn_j+%5Cepsilon_%7Bjkl%7D+r_k+%5Cdelta_%7Bli%7D%5C%2C+%3D+%5C%2C+-i+%5Chbar+%5Csum_%7Bjk%7Dn_j+%5Cepsilon_%7Bjki%7D+r_k&bg=ffffff&fg=000&s=0&c=20201002)

![\Rightarrow \, -i\frac{\phi}{\hbar} [ \hat{n} \cdot \vec{L} \, , \, \vec{r}] \, = \, - \phi \ \hat{n} \times \vec{r} \, = \, \phi \ \vec{r} \times \hat{n}](https://s0.wp.com/latex.php?latex=%5CRightarrow+%5C%2C+-i%5Cfrac%7B%5Cphi%7D%7B%5Chbar%7D+%5B+%5Chat%7Bn%7D+%5Ccdot+%5Cvec%7BL%7D+%5C%2C+%2C+%5C%2C+%5Cvec%7Br%7D%5D+%5C%2C+%3D+%5C%2C+-+%5Cphi+%5C+%5Chat%7Bn%7D+%5Ctimes+%5Cvec%7Br%7D+%5C%2C+%3D+%5C%2C+%5Cphi+%5C+%5Cvec%7Br%7D+%5Ctimes+%5Chat%7Bn%7D&bg=ffffff&fg=000&s=0&c=20201002)

![\Rightarrow \, [ -\frac{i}{\hbar} \ \phi \ (\hat{n} \cdot \vec{L}) \, , \, [-\frac{i}{\hbar} \ \phi \ (\hat{n} \cdot \vec{L}) \, , \, \vec{r}]]\,](https://s0.wp.com/latex.php?latex=%5CRightarrow+%5C%2C+%5B+-%5Cfrac%7Bi%7D%7B%5Chbar%7D+%5C+%5Cphi+%5C+%28%5Chat%7Bn%7D+%5Ccdot+%5Cvec%7BL%7D%29+%5C%2C%C2%A0+%2C+%5C%2C+%5B-%5Cfrac%7Bi%7D%7B%5Chbar%7D+%5C+%5Cphi+%5C+%28%5Chat%7Bn%7D+%5Ccdot+%5Cvec%7BL%7D%29+%5C%2C+%2C+%5C%2C+%5Cvec%7Br%7D%5D%5D%5C%2C+&bg=ffffff&fg=000&s=0&c=20201002)
![= \, \frac{i}{\hbar} \phi^2 [ \hat{n} \cdot \vec{L} \, , \, \hat{n} \times \vec{r} ]](https://s0.wp.com/latex.php?latex=%3D+%5C%2C+%5Cfrac%7Bi%7D%7B%5Chbar%7D+%5Cphi%5E2%C2%A0+%C2%A0%5B+%5Chat%7Bn%7D+%5Ccdot+%5Cvec%7BL%7D+%5C%2C+%2C+%5C%2C+%5Chat%7Bn%7D+%5Ctimes+%5Cvec%7Br%7D+%5D+&bg=ffffff&fg=000&s=0&c=20201002)
![[ \hat{n} \cdot \vec{L} \, , \, \hat{n} \times \vec{r} ]_x \, = \, [ \sum_j n_j L_j \, , \, n_y z - n_z y ] \, = \, n_y [ \hat{n} \cdot \vec{L} \, , z ]\, - \,n_z [ \hat{n} \cdot \vec{L} \, , y ]](https://s0.wp.com/latex.php?latex=%5B+%5Chat%7Bn%7D+%5Ccdot+%5Cvec%7BL%7D+%5C%2C+%2C+%5C%2C+%5Chat%7Bn%7D+%5Ctimes+%5Cvec%7Br%7D+%5D_x+%5C%2C+%3D+%5C%2C+%5B+%5Csum_j+n_j+L_j+%5C%2C+%2C+%5C%2C+n_y+z+-+n_z+y+%5D+%5C%2C+%3D+%5C%2C+n_y+%5B+%5Chat%7Bn%7D+%5Ccdot+%5Cvec%7BL%7D+%5C%2C+%2C+z+%5D%5C%2C+-+%5C%2Cn_z+%5B+%5Chat%7Bn%7D+%5Ccdot+%5Cvec%7BL%7D+%5C%2C+%2C+y+%5D&bg=ffffff&fg=000&s=0&c=20201002)

![= \, i \hbar [x(n_z^2 +n_y^2) -n_x n_y y - n_x n_z z] \, = \,i \hbar [x(n_y^2 +n_z^2) -n_x n_y y - n_x n_z z]](https://s0.wp.com/latex.php?latex=%3D+%5C%2C+i+%5Chbar+%5Bx%28n_z%5E2+%2Bn_y%5E2%29+-n_x+n_y+y+-+n_x+n_z+z%5D+%5C%2C+%3D+%5C%2Ci+%5Chbar+%5Bx%28n_y%5E2+%2Bn_z%5E2%29+-n_x+n_y+y+-+n_x+n_z+z%5D&bg=ffffff&fg=000&s=0&c=20201002)
![\vec{r'} \, = \ \vec{r} \,- \, \phi \, \hat{n} \times \vec{r} \, + \, \frac{1}{2!} \ \, \frac{i}{\hbar} \phi^2 [ \hat{n} \cdot \vec{L} \, , \, \hat{n} \times \vec{r} ] \, + \, \ldots](https://s0.wp.com/latex.php?latex=%5Cvec%7Br%27%7D+%5C%2C+%3D+%5C+%5Cvec%7Br%7D+%5C%2C-+%5C%2C+%5Cphi+%5C%2C+%5Chat%7Bn%7D+%5Ctimes+%5Cvec%7Br%7D+%5C%2C+%2B+%5C%2C+%5Cfrac%7B1%7D%7B2%21%7D+%5C+%5C%2C+%5Cfrac%7Bi%7D%7B%5Chbar%7D+%5Cphi%5E2%C2%A0+%C2%A0%5B+%5Chat%7Bn%7D+%5Ccdot+%5Cvec%7BL%7D+%5C%2C+%2C+%5C%2C+%5Chat%7Bn%7D+%5Ctimes+%5Cvec%7Br%7D+%5D+%5C%2C+%2B+%5C%2C+%5Cldots&bg=ffffff&fg=000&s=0&c=20201002)





![= \, \vec{r} \, - \, \frac{i}{\hbar} \, \delta \, [\hat{n} \cdot \vec{L} , \vec{r} ] \, + \, O_{\ge}(\phi^2)](https://s0.wp.com/latex.php?latex=%3D+%5C%2C+%5Cvec%7Br%7D+%5C%2C+-+%5C%2C+%5Cfrac%7Bi%7D%7B%5Chbar%7D+%5C%2C+%5Cdelta+%5C%2C+%5B%5Chat%7Bn%7D+%5Ccdot+%5Cvec%7BL%7D+%2C+%5Cvec%7Br%7D+%5D+%5C%2C+%2B+%5C%2C+O_%7B%5Cge%7D%28%5Cphi%5E2%29&bg=ffffff&fg=000&s=0&c=20201002)


![= \, \vec{p} \, + \, [-\frac{i}{\hbar} \ \phi \ (\hat{n} \cdot \vec{L}) \, , \, \vec{p}] \, + \, \frac{1}{2!}\ [ -\frac{i}{\hbar} \ \phi \ (\hat{n} \cdot \vec{L}) \, \, , \, [-\frac{i}{\hbar} \ \phi \ (\hat{n} \cdot \vec{L}) \, , \, \vec{p} \ ] \, + \, \ldots](https://s0.wp.com/latex.php?latex=%3D+%5C%2C+%5Cvec%7Bp%7D+%5C%2C+%2B+%5C%2C+%5B-%5Cfrac%7Bi%7D%7B%5Chbar%7D+%5C+%5Cphi+%5C+%28%5Chat%7Bn%7D+%5Ccdot+%5Cvec%7BL%7D%29+%5C%2C+%2C+%5C%2C+%5Cvec%7Bp%7D%5D+%5C%2C+%2B+%5C%2C+%5Cfrac%7B1%7D%7B2%21%7D%5C+%5B+-%5Cfrac%7Bi%7D%7B%5Chbar%7D+%5C+%5Cphi+%5C+%28%5Chat%7Bn%7D+%5Ccdot+%5Cvec%7BL%7D%29+%5C%2C+%5C%2C+%2C+%5C%2C+%5B-%5Cfrac%7Bi%7D%7B%5Chbar%7D+%5C+%5Cphi+%5C+%28%5Chat%7Bn%7D+%5Ccdot+%5Cvec%7BL%7D%29+%5C%2C+%2C+%5C%2C+%5Cvec%7Bp%7D+%5C+%5D+%5C%2C+%2B+%5C%2C+%5Cldots&bg=ffffff&fg=000&s=0&c=20201002)
![\Rightarrow \vec{p'} \, = \ \vec{p} \,- \, \phi \, \hat{n} \times \vec{p} \, + \, \frac{1}{2!} \ \, \frac{i}{\hbar} \phi^2 [ \hat{n} \cdot \vec{L} \, , \, \hat{n} \times \vec{p} ] \, + \, \ldots](https://s0.wp.com/latex.php?latex=%5CRightarrow+%5Cvec%7Bp%27%7D+%5C%2C+%3D+%5C+%5Cvec%7Bp%7D+%5C%2C-+%5C%2C+%5Cphi+%5C%2C+%5Chat%7Bn%7D+%5Ctimes+%5Cvec%7Bp%7D+%5C%2C+%2B+%5C%2C+%5Cfrac%7B1%7D%7B2%21%7D+%5C+%5C%2C+%5Cfrac%7Bi%7D%7B%5Chbar%7D+%5Cphi%5E2%C2%A0+%C2%A0%5B+%5Chat%7Bn%7D+%5Ccdot+%5Cvec%7BL%7D+%5C%2C+%2C+%5C%2C+%5Chat%7Bn%7D+%5Ctimes+%5Cvec%7Bp%7D+%5D+%5C%2C+%2B+%5C%2C+%5Cldots&bg=ffffff&fg=000&s=0&c=20201002)


![= \, \vec{p} \, - \, \frac{i}{\hbar} \, \delta \, [\hat{n} \cdot \vec{L} , \vec{p} ] \, + \, O_{\ge}(\phi^2)](https://s0.wp.com/latex.php?latex=%3D+%5C%2C+%5Cvec%7Bp%7D+%5C%2C+-+%5C%2C+%5Cfrac%7Bi%7D%7B%5Chbar%7D+%5C%2C+%5Cdelta+%5C%2C+%5B%5Chat%7Bn%7D+%5Ccdot+%5Cvec%7BL%7D+%2C+%5Cvec%7Bp%7D+%5D+%5C%2C+%2B+%5C%2C+O_%7B%5Cge%7D%28%5Cphi%5E2%29&bg=ffffff&fg=000&s=0&c=20201002)

2. Rotaciones en el espacio de espín
- Sea la función de onda general en el espacio de espín
,
interpretándose (supuesta cumplida la condición de normalización indicada) cada valorcomo la probabilidad de encontrar a la partícula en el estado de espín
, es decir, con resultado de la medida el valor
para el número cuántico de tercera componente de espín
.
- El generador de las rotaciones en el espacio de espín en torno a la dirección
, y los operadores unitarios correspondientes a las rotaciones finitas de ángulo
(¡deducción no trivial!; en rigor, la expresión del operadordebería incorporar un signo
global, puesto que el grupo de rotaciones es doblemente conectado; no lo explicitamos, aunque calcularemos que un estado de espín semientero necesitará rotar
para permanecer inalterado; véase [SCH-68], pp. 199-204 para una exposición simple; [GAL-89], pp. 245ss. para una discusión más profunda).
-Por tanto, una función de espínse transforma pues bajo rotaciones según
.
- En particular, en el caso de espín
se tiene, bajo una rotación finita:
;
-El operador de rotaciónadmite la expresión:
,
que, haciendo uso de las siguientes propiedades de las matrices de Pauli:
junto con las igualdades
,
se convierte en:
.
-Por lo tanto, la ecuación de transformación bajo rotaciones finitas de un estado de espíntiene la expresión:
().
- Ejemplos:
- Rotación finita de ángulo
del estado
- Rotación finita de ángulo
alrededor del eje
.
Este cambio global resulta indetectable experimentalmente, ya que todas las cantidades medibles (como los elementos de matriz, los valores medios…) dependen bilinealmente del estado (podría observarse de forma local, usando un haz desdoblado y un dispositivo tipo doble rendija, véase [GAL-89]p.262). - Rotación finita de ángulo
,
de forma que los estados de espín entero se mantienen inalterados bajo estas rotaciones, mientras que los de espín semi-impar cambian de signo.
- Rotación finita de ángulo





















3. Rotaciones y momento angular total
3.1. Generador de las rotaciones en sistemas con espín
- Dado un sistema físico aislado, cuyo Hamiltoniano será por tanto independiente del parámetro temporal, y asumido que el espacio tridimensional es intrínsecamente isótropo, esto es, en su seno todas las direcciones son equivalentes, la física del sistema debe permanecer invariante bajo rotaciones en ese espacio, o sea, las leyes físicas que atañen al sistema deben permanecer invariantes bajo una rotación en el espacio.
- Sea una partícula con espín, sistema para el que las tres componentes del vector posición más la tercera componente del espín integran un C.C.O.C.; dado este C.C.O.C. (representación),
, para cada ket
la función de onda general en representación de posiciones,
, admite desarrollo en serie en términos de las autofunciones de espín:
-Por tanto, una partícula de espínes descrita por una función de onda espinor
componentes
, cada una de ellas asociada a un valor particular de los
,o sea , equivalentemente, para la variable
, la cual, a diferencia de
-En definitiva, el espacio de Hilbert del sistema se realiza para el sistema con espín.
- Pueden usarse diferentes tipos de notaciones para los espinores:
,
donde
.
-En términos matriciales:
- El generador de las rotaciones en el espacio de Hilbert asociado a una partícula con espín, por ejemplo su realización funcional
, esto es, la proyección del momento angular total
sobre esa dirección del espacio, y los operadores unitarios correspondientes a las rotaciones finitas de ángulo
-La deducción de estas expresiones es complicada. En rigor, la expresión del operadordebería incorporar un signo
-Por tanto, un espinor
:
-Se prepara al sistema experimentalmente (medidas de primera especie) en el estado describible, en representación de coordenadas, por el espinordel Hilbert asociado al sistema en el formalismo mecano-cuántico. A continuación, se considera una rotación de ángulo








3.2. Transformaciones de la base acoplada y expresión matricial de los operadores de rotación
- La rotación activa positiva (sentido antihorario)
, rotación del sistema, caracterizada por los tres ángulos de Euler
, que es equivalente a una rotación de ángulo
,
,
se corresponde con el operador rotación
,
dondesimboliza cada componente del operador momento angular total, el generador de las rotaciones.
- Transformación de los estados de la base acoplada,
bajo el grupo de rotaciones:
,
expresión que define la matriz del operador de rotaciónen la base acoplada, o matriz de Wigner, de valor:
,
expresión que define la matriz pequeña de Wigner,:
.
calculada de forma general por Wigner en 1931 (ésta y variadas fórmulas adicionales pueden encontrarse en el apéndice B de la referencia [GAL-89]). - Caso particular: sea
:
-Por ejemplo:
- Transformación de los estados de la base:












Referencias
[BAL-98] Ballentine, L.E.; “Quantum Mechanics: A Modern Development”; World Scientific; Singapore, 1998.
[BOH-79] Bohm, D.; “Quantum Theory”; Dover; New York, 1979.
[GAL-89] Galindo, A. y Pascual, P.; «Mecánica Cuántica», Eudema, 1989.
[NEU-91] Neumann, J. von; «Fundamentos matemáticos de la Mecánica Cuántica», CSIC, Raycar, Madrid, 1991.
[SCH-68] Shiff, L.I. ; Quantum Mechanics, 3º ed; McGraw-Hill, 1968.
Páginas complementarias
–La matriz generadora de la rotación en el blog la-mecanica-cuantica.blogspot.com.
–Rotaciones de las matrices de Pauli en el blog la-mecanica-cuantica.blogspot.com.
–Momento angular en el blog la-mecanica-cuantica.blogspot.com
–Operadores tensoriales irreducibles.
–Operadores tensoriales en el blog la-mecanica-cuantica.blogspot.com
–Grupos de Lie, rotaciones, unitarios, Poincaré: apuntes de L.L. Salcedo.
APPS
-momento angular cuántico en la Wikipedia
–Addition of Angular Momenta in Quantum Mechanics en WOLFRAM Demonstrations Project
Dejar una contestacion